















Agile Steps. Intelligent Future.
ENGINEAI SA01
An open-source, highly-expandable bipedal robot platform that supports user customization and offers exceptional cost-effectiveness.
Core Competence
-
Fully open-source design
Full-stack technology sharing empowers global developers to collaborate and iterate.
-

Ultra-high joint freedom
Ultra-high-end joints with 12 degrees of freedom, flexibly adapting to various complex scenarios
-

Self-developed straight-knee gait
Abandoning the stiff, knee-bending gait of traditional robots, our proprietary straight-knee technology enables robots to take strides as natural as those of humans.
-

Full-stack self-developed high-performance joints
Our proprietary joints achieve deep integration between hardware and software, with sensors capturing motion data in real time and algorithms responding and adjusting swiftly.
-

Aluminum alloy body
Combining impact resistance with lightweight design, it provides robust protection for internal hardware.
-

High-capacity battery
15Ah (0.819kWh), maximum voltage 54.6V, capable of meeting extended continuous operation requirements.
Fully Open-Source Design
End-to-End Technology Sharing that Fosters Global Co-creation and Iteration

The platform enables users to customize and modify the mechanical structure to suit their needs, with support for adding compatible modules such as robotic arms.
thereby expanding the robot's functional applications. Its open-design approach enables research teams to gain a deep understanding of its core technologies.
The robot's core structure, and freely experiment with various hardware modifications to enable custom development and innovative experiments in diverse scenarios.
Open-source motion control algorithms
Transparent underlying code, accelerating algorithm research and iteration

Users have access to the underlying control code, allowing them to modify or replace algorithm modules based on their needs.
Directly deploy your self-developed control strategies onto the physical robot for real-world validation.
By open-sourcing our strategy, we lower the barrier to algorithmic experimentation. Users can understand the control principles of bipedal robots by reading
the source code and quickly get started developing
their own locomotion algorithms.

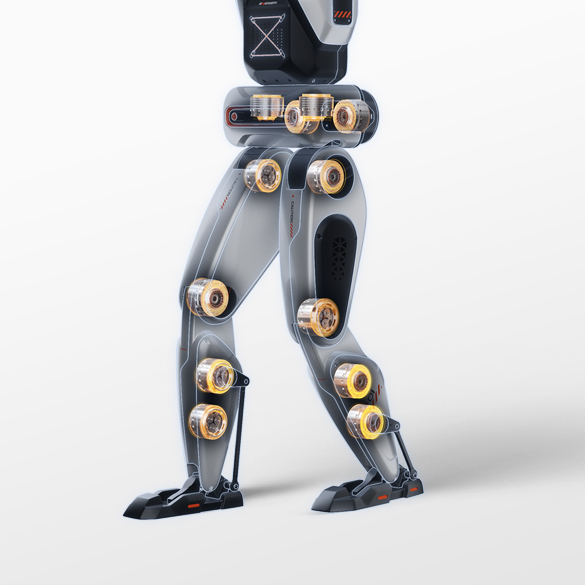
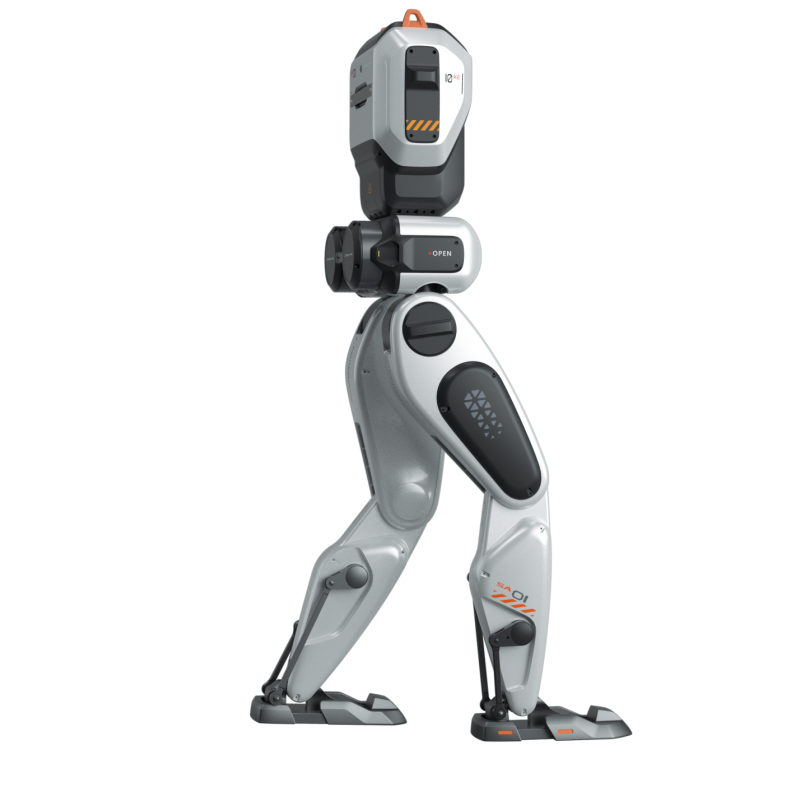
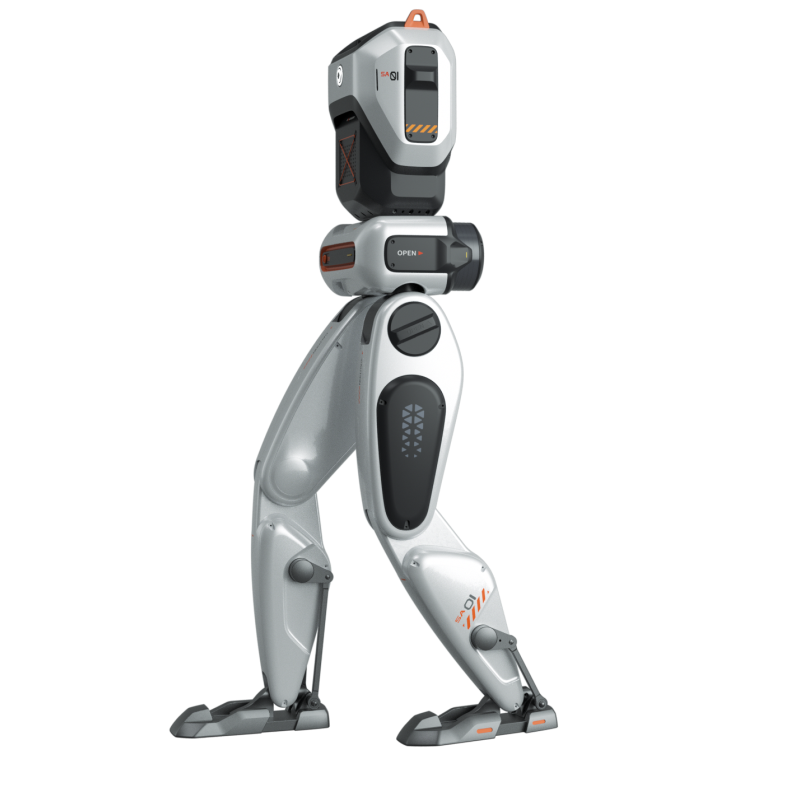
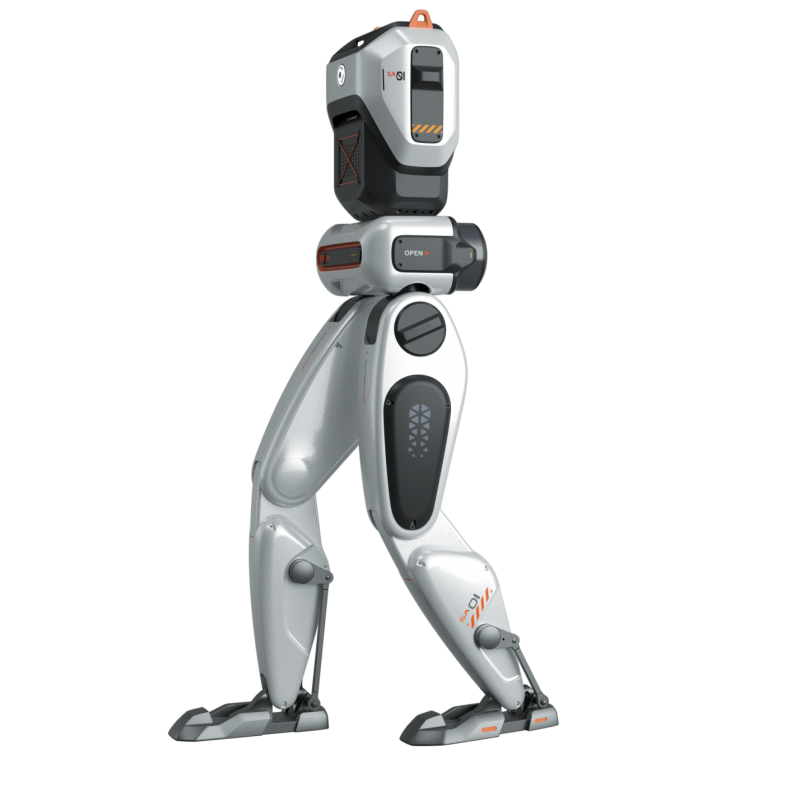
Self-developed straight-knee gait
SA01 is equipped with a high-performance drive system and advanced motion control algorithms, delivering exceptional dynamic performance. Its bionic legs, each with six degrees of freedom, enable a smooth, self-developed straight-legged gait. Powerful real-time balance control ensures stable movement even during acceleration, emergency stops, or when responding to external disturbances.
Full-stack self-developed high-performance joints
SA01 features full-stack self-developed integrated joint modules, with peak torque of 160 Nm at both the hip and knee joints. This robust power output enables the robot to handle high-load operations with ease. The innovative joint design incorporates dual absolute magnetic encoders, ensuring quick and precise positional recovery after power cycles. Each joint comes with comprehensive safety mechanisms for reliable operation.
-
Bipedal Coordination Control
Coordinate bipedal six degrees of freedom to achieve smooth, independently developed straight-knee gait。
-

Real-time balance control
Open architecture helps students gain a deeper understanding of robot control principles.
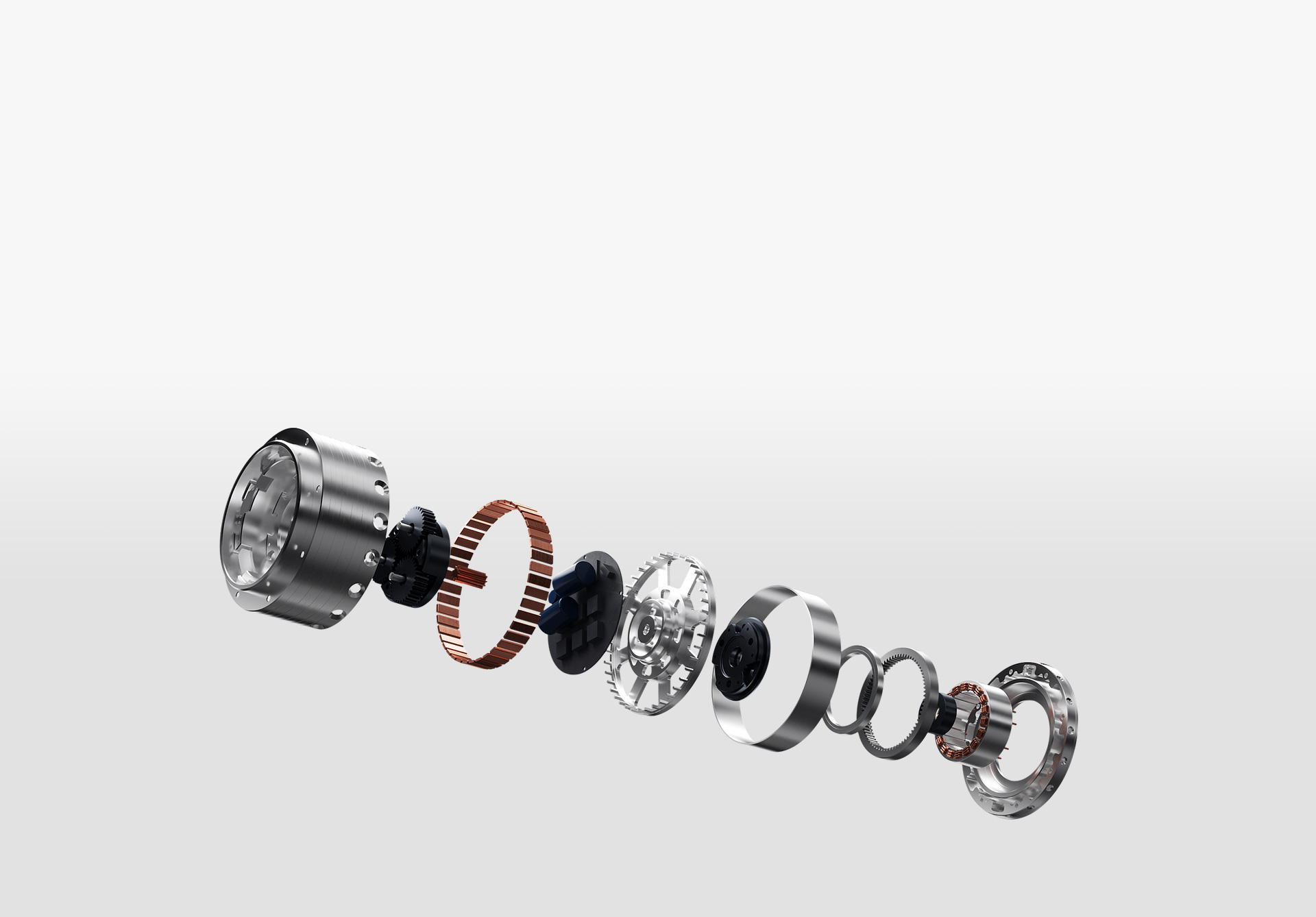
Full-stack self-developed high-performance joints
SA01 features full-stack self-developed integrated joint modules, with peak torque of 160 Nm at both the hip and knee joints. This robust power output enables the robot to handle high-load operations with ease. The innovative joint design incorporates dual absolute magnetic encoders, ensuring quick and precise positional recovery after power cycles. Each joint comes with comprehensive safety mechanisms for reliable operation.

1 The peak torque of both the hip and knee joints reaches 160 N·m
2 The innovative joint design incorporates dual absolute magnetic encoders.
3 Each joint is equipped with a comprehensive built-in safety mechanism.
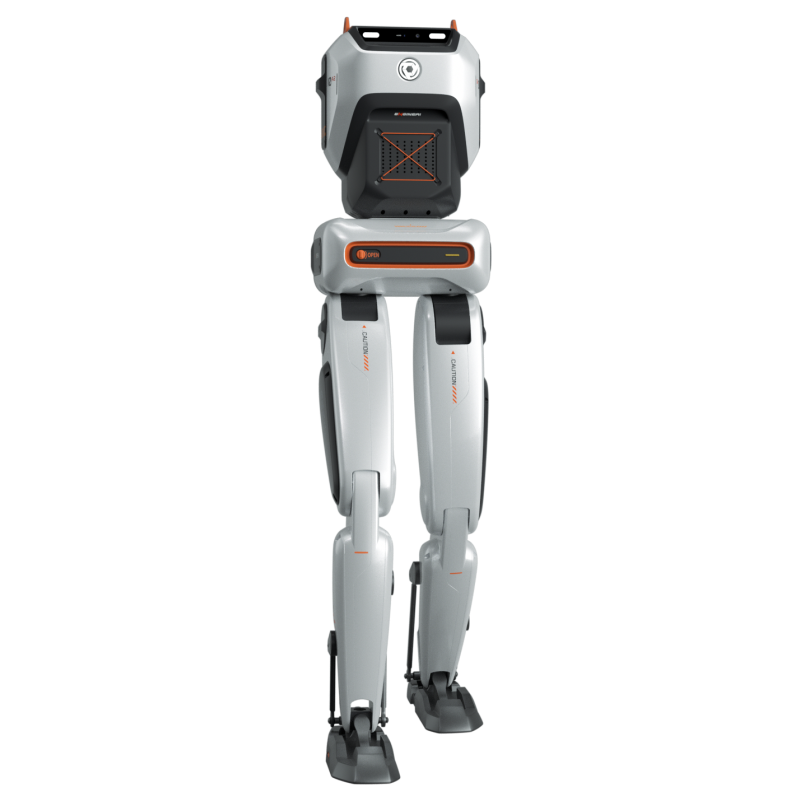
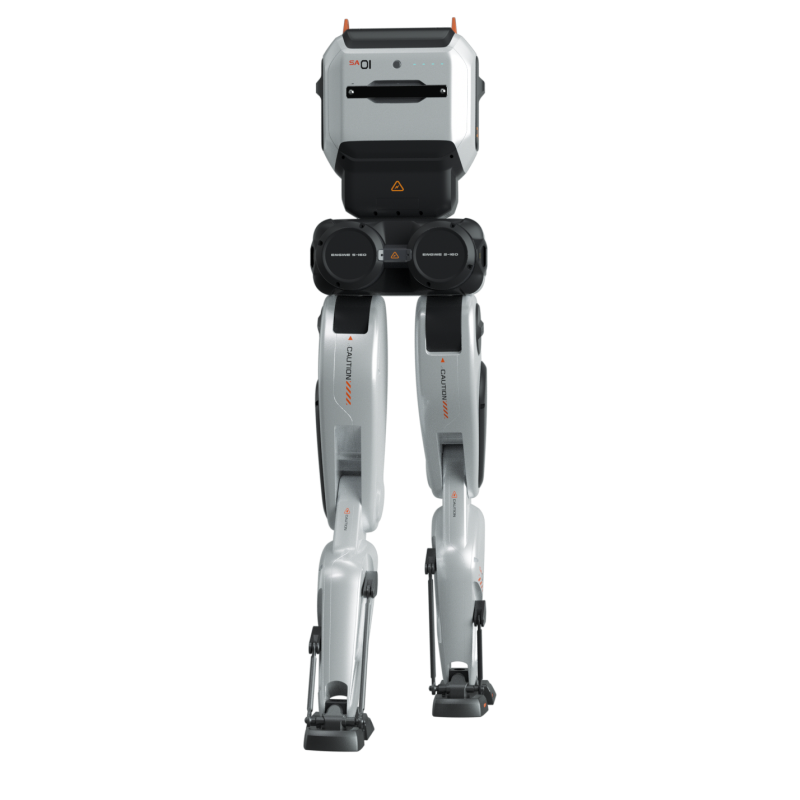
Aluminum Alloy Exoskeleton

Aviation-grade aluminum alloy material
The frame and outer shell of theSA01 are constructed from aerospace-grade aluminum alloy, delivering exceptional durability while effectively reducing overall weight.

High-strength housing
The precision-engineered aluminum alloy exoskeleton design enhances overall stability. The high-strength housing provides comprehensive protection for internal critical components, ensuring the robot maintains stable performance under harsh environments and intensive use.

High-capacity quick-release battery
The SA01 is equipped with a 15Ah/54.6V high-energy-density lithium battery pack featuring a quick-swap design to support extended continuous operation.
Lithium battery pack
High energy


































































































Core Technology

High-Performance Power Joint Full-Stack In-House Development
Equipped with high-precision planetary drive joints
Providing robust hardware support for algorithm deployment
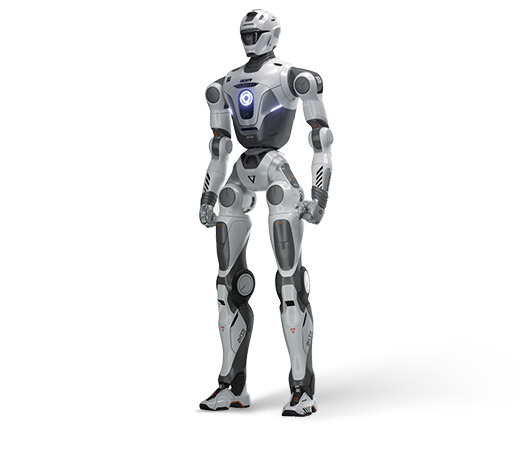
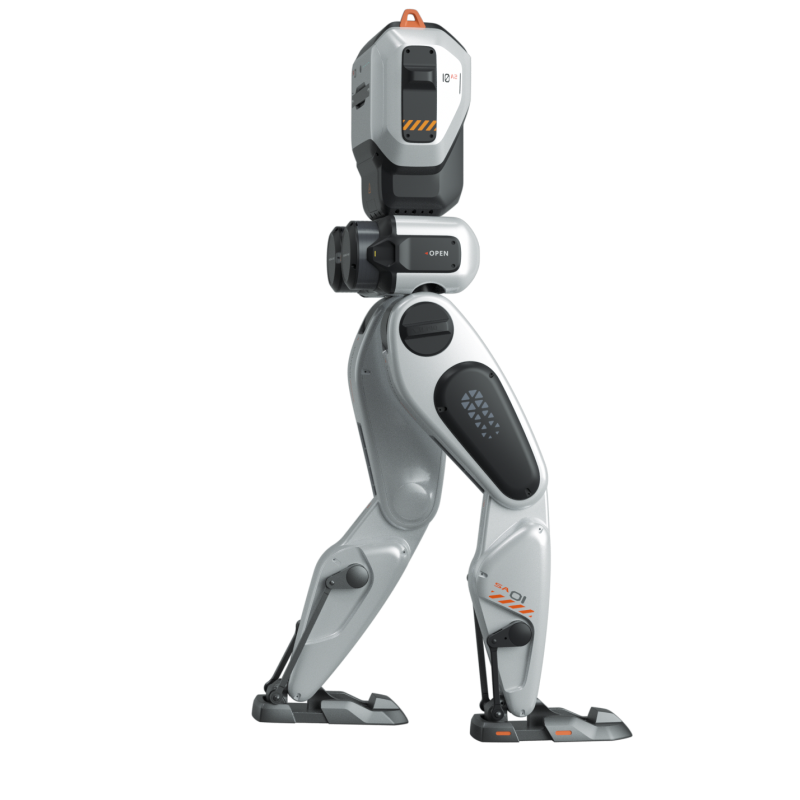
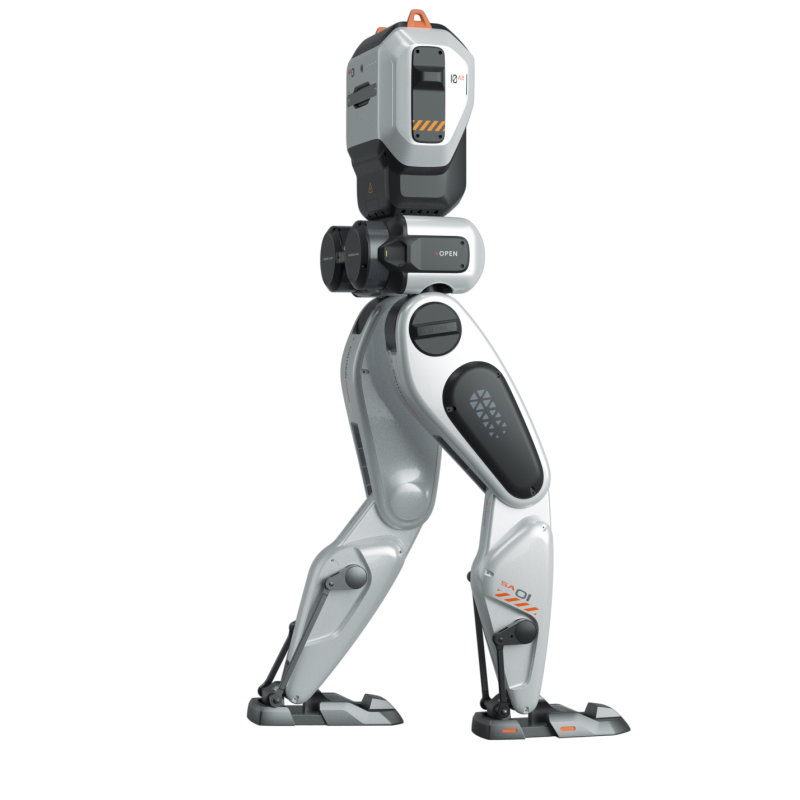
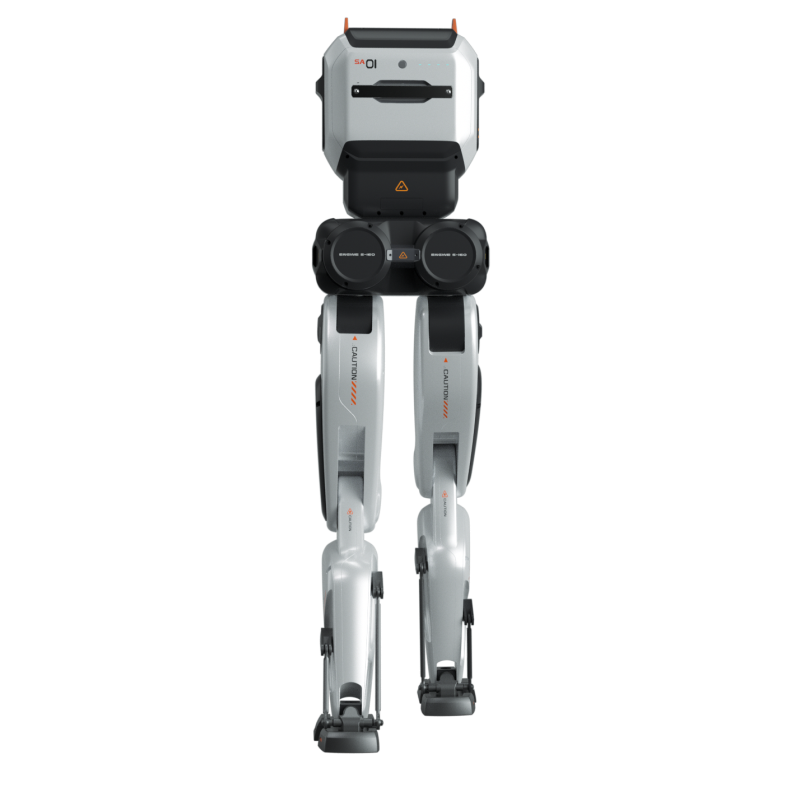
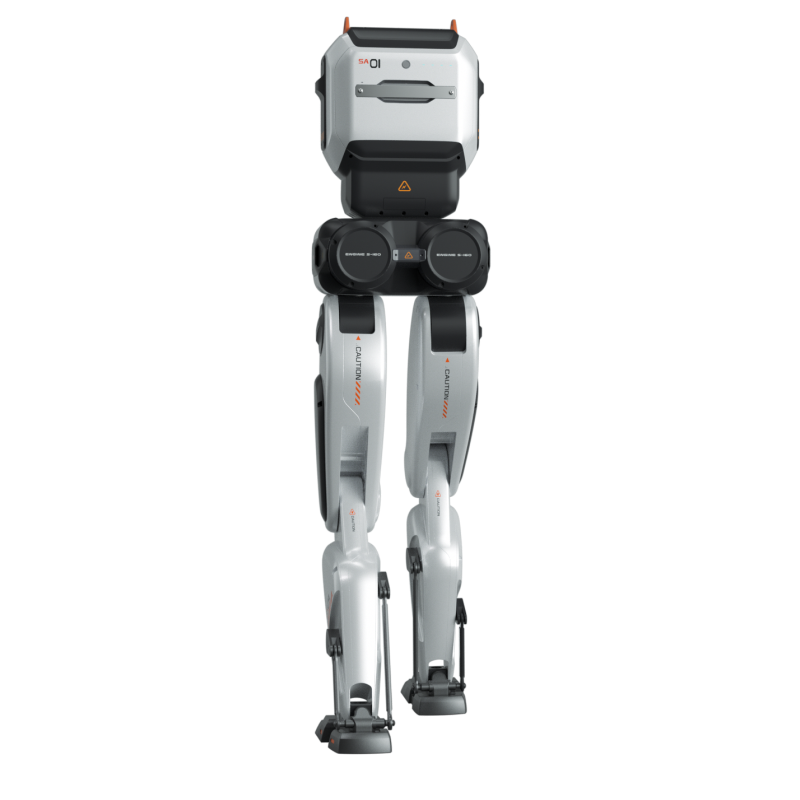
Human upright posture
Achieves a truly rare straight-legged standing and dynamic posture
The black-and-white body exudes elegance and sophistication, while orange accents add a vibrant touch
Powerful motor, abundant power
Self-developed S160 motor with off-the-charts specs
Paired with advanced motion control algorithms
Delivers outstanding walking and running capabilities
Quick-release battery compartment
Features a 15Ah high-capacity lithium battery
Operates continuously for over two hours
Easy to access, hassle-free charging, and long-lasting performance
12 DOF throughout the body
Built-in IMU sensor
Excellent balance and stability
Achieves optimal human-like gait through core motion module
Aluminum alloy exoskeleton
Integrated Sealing and Heat Dissipation
Balancing Strength and Aesthetics
Material Selection and Structural Design
Both Achieve Industry-Leading Standards
High-Performance Power Joint Full-Stack In-House Development
Equipped with high-precision planetary drive joints
Providing robust hardware support for algorithm deployment
Human upright posture
Achieves a truly rare straight-legged standing and dynamic posture
The black-and-white body exudes elegance and sophistication, while orange accents add a vibrant touch
Powerful motor, abundant power
Self-developed S160 motor with off-the-charts specs
Paired with advanced motion control algorithms
Delivers outstanding walking and running capabilities

Quick-release battery compartment
Features a 15Ah high-capacity lithium battery
Operates continuously for over two hours
Easy to access, hassle-free charging, and long-lasting performance
12 DOF throughout the body
Built-in IMU sensor
Excellent balance and stability
Achieves optimal human-like gait through core motion module
Aluminum alloy exoskeleton
Integrated Sealing and Heat Dissipation
Balancing Strength and Aesthetics
Material Selection and Structural Design
Both Achieve Industry-Leading Standards
Technical Specifications
-
Dimensions and Weight
Dimensions (L × W × H, standing)
nearly 1350 mm × 250 mm × 350 mm
Calf and thigh length
400 mm / 400 mm
Weight
nearly 40 kg
Total DOF
12
-
Exercise parameters
Movement speed
约 1 m/s
Maximum Torque (Nm)
160
Single-leg DOF
6
-
Motor Model
Power Supply Method
15Ah (0.819kWh), maximum voltage 54.6V
Operating Temperature
-20℃ ~ 55℃
Battery life
nearly 2 hour
-
Perception System Parameters
IMU Inertial Measurement Unit
High-Precision IMU for Attitude Sensing and Balance Control
-
Load capacity
Load capacity
nearly10–15 kg

![[x]](/static/home/images/closeicon1.svg)