
















EngineAI Full-Size High-Dynamic General-Purpose Robot
ENGINEAI T800
Hardcore Evolution, Explosive Rebirth.
Born to disrupt
A general-purpose robot that integrates peak performance, omnidirectional awareness, and long-endurance operation, empowering a wide range of applications.
 Play the full video
Play the full video
Technical Highlights

One Size for All Scenarios
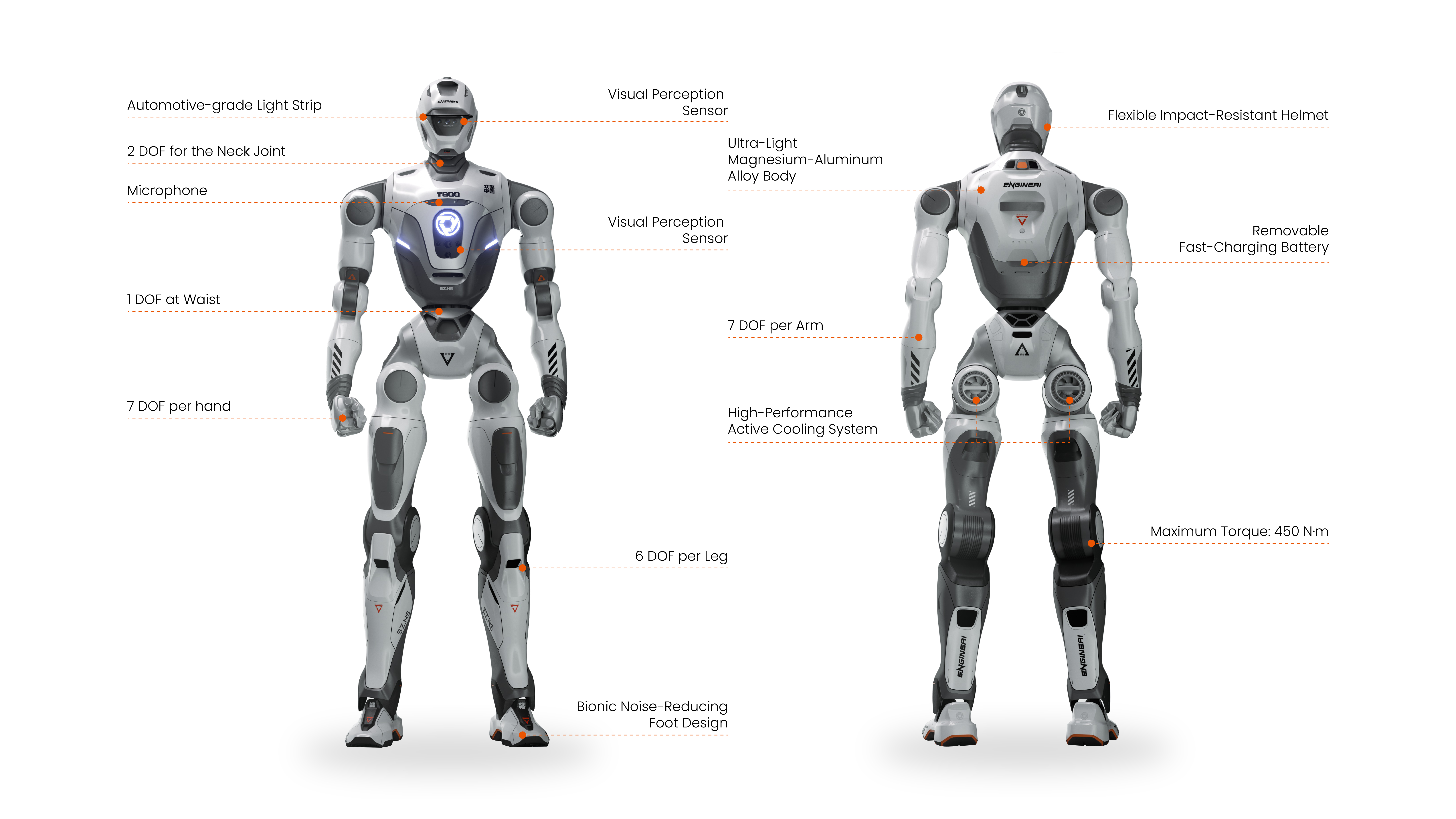
173cm in height

Endurance for High-Intensity Work
Full leg joint active cooling enabling 4 hours of continuous operation

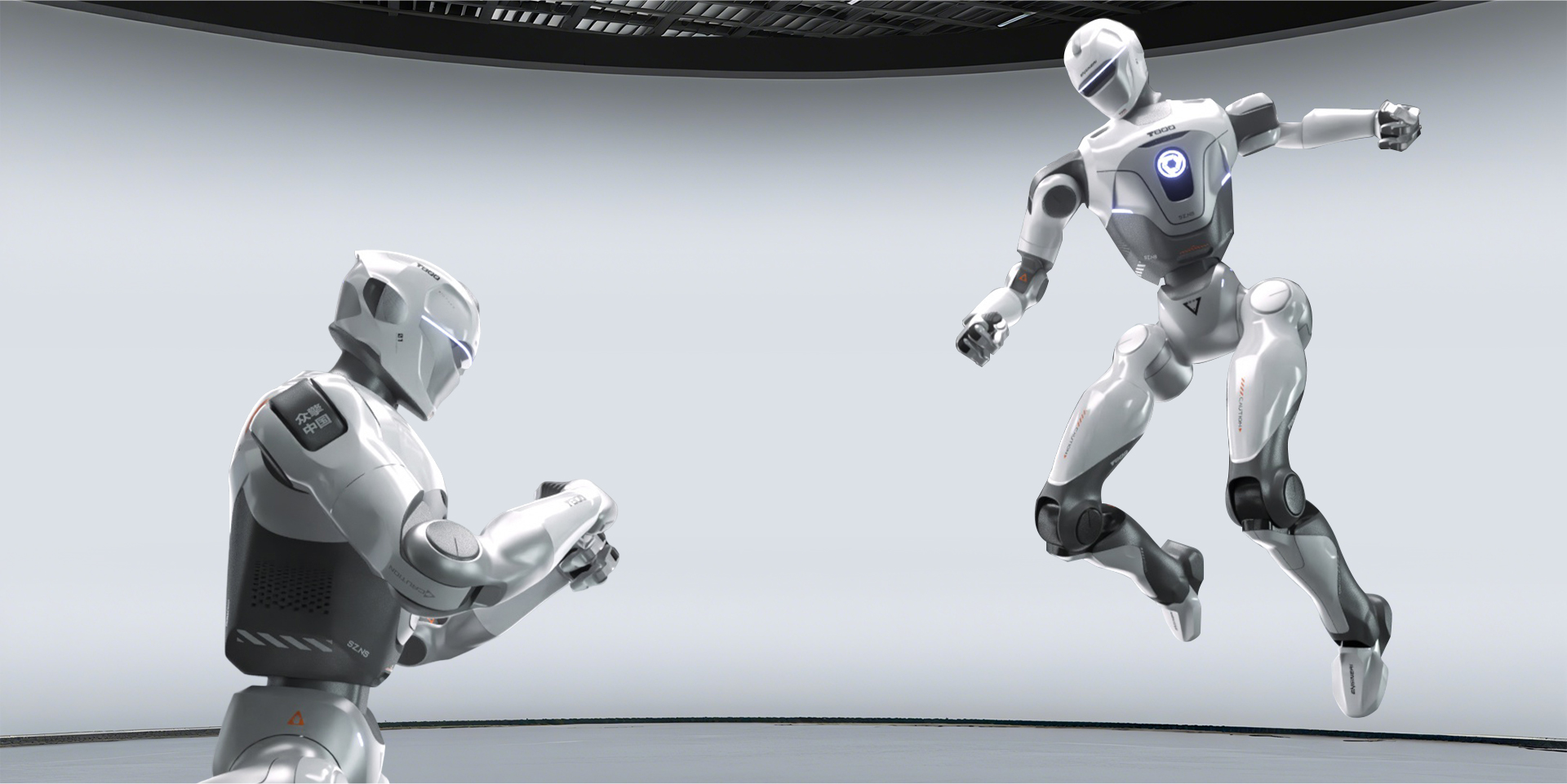
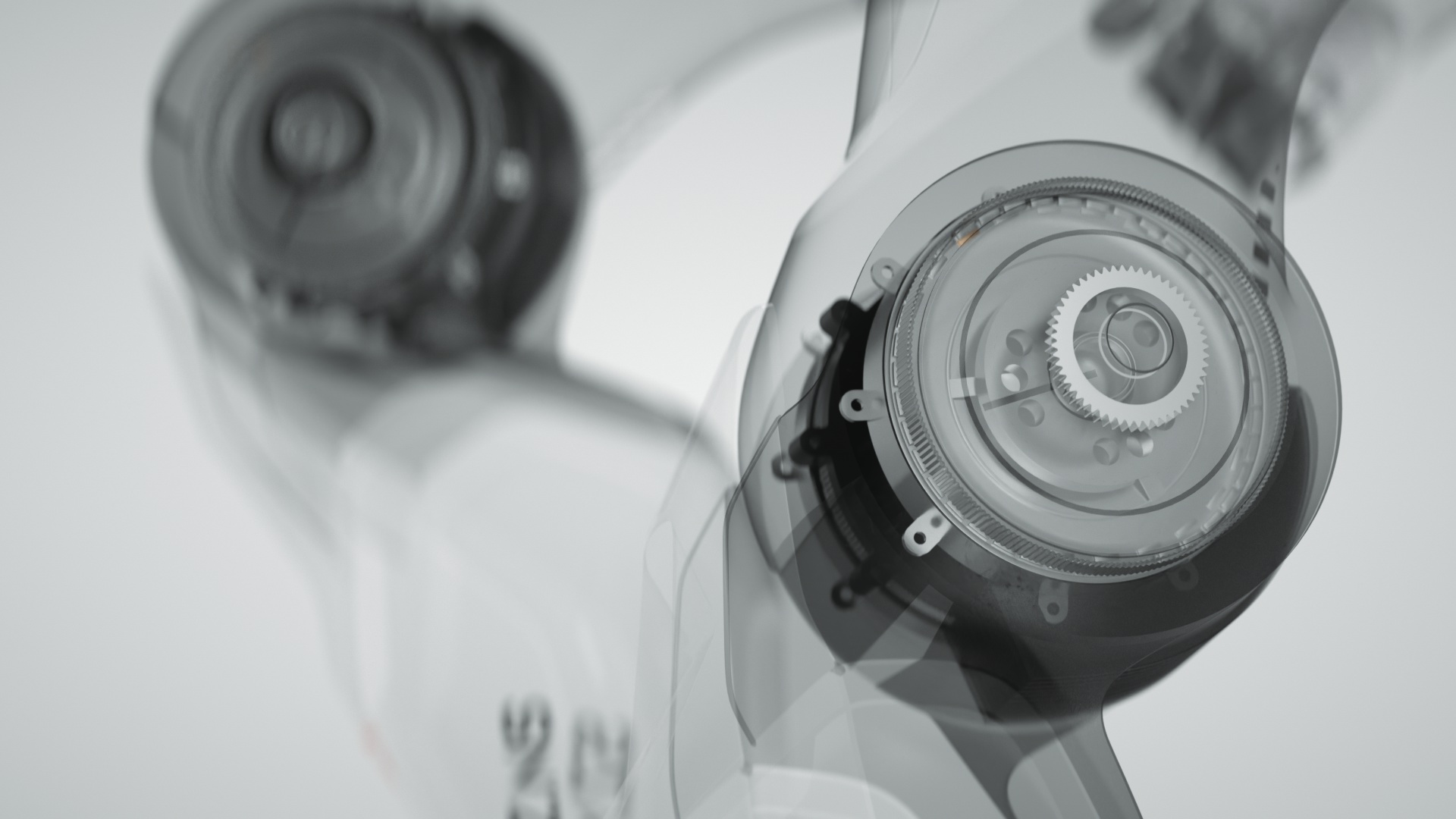
High DOF joint design
29 DOF throughout the body
(excluding the dexterous hand)
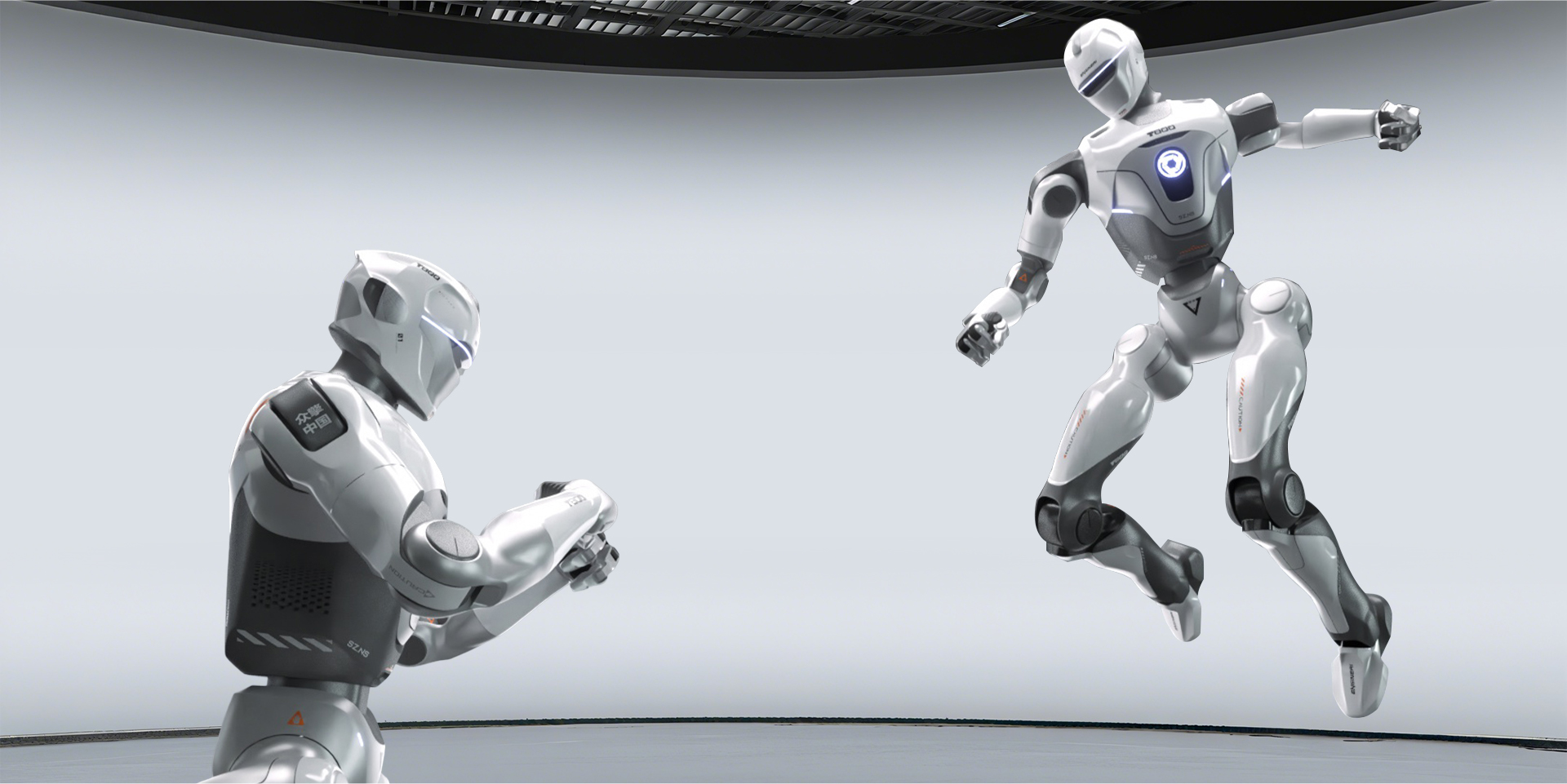
Anthropomorphic motion design
Supports seamless transitions
between complex movements

Multi-Modal Perception System
Includes in-house develope
miniaturized joint modules
360° omnidirectional radar
Millisecond-level
environmental
data processing

Industry-leading explosive power
Joint torque of up to 450 N·m

Ultimate Power Aesthetics
Power-Technology Integration
Robust Shell
Motion Demo



Combination punch

Flying Kick

Five-Hit Kick

Taunt
Roundhouse kick
Punch-Kick Combos
Capoeira
Five consecutive kicks
Walking


Streamlined Aesthetics and High-Strength Alloy Chassis
The streamlined design features sharp, clean lines.

Sustained High-Performance Cooling System
Allowing the robot to thrive under heavy loads and high temperatures.
Multi-modal Dexterous Hand
It enables fine grasping and flexible manipulation, adapting to diverse object handling requirements.

Omnidirectional Sensor Fusion System
millisecond-level data processing for precise obstacle avoidance.
Modular Solid-State Battery Architecture
Delivers up to 4 hours of powerful endurance, easily handling various high-intensity, long-duration operation scenarios.
Coordinated movement of high-degree-of-freedom joints.
High-degrees-of-freedom (DOF) joints and anthropomorphic motion design enable seamless transitions between complex actions.
Application Scenarios

Logistics Warehouse

Hotel Services

Sales Associate

Human-Robot Collaboration
Now, We Pioneer a Shared Future.
Core Parameters
Product Specifications
-
Basic Edition
Price(USD)
40,500
Appearance
Release Edition
Height
173cm
Weight
Depending on the edition, the weight may vary (75kg to 85kg).
Total Degrees of Freedom
25
Degrees of Freedom per hand
0
Lower leg + thigh length
91cm
Arm length
60cm
Degree of freedom of the neck
2
Degrees of Freedom per leg
6
Degree of freedom of the waist
1
Degrees of Freedom per arm
5
Articular movement space
Waist: Y-251°~71°
Hip: R-118°~62°, P-190°~130°, Y-81°~206°
Knee: P-15°~135°
Foot: P-39°~39°, R-15°~15°
Head: P-30°~30°, Y-70°~70°
Shoulder: P-170°~160°, R-140°~22°, Y-150°~150°
Elbow: P-131°~15°, R-150°~150°
Wrist: P:-25°~25°, R-35°~65°
(May vary depending on edition)Fully articulated hollow internal wiring
√
Hardware-supported movement speed
≥3m/s
Perception sensor
Intel Depth Camera
Basic Computing Power (Robot PC)
Intel Module (Optional RK3588)
High-performance computing module (AI PC)
Orin NX 16G
Communication module
Wi-Fi + Bluetooth + USB + LAN
secondary development
/
Smart Battery (Quick-Release)
√
Lighting configuration
2 headlamps + 2 chest lamps + knee lamps
Microphone
Equipped
loudspeaker
Equipped
Handheld remote control
Equipped
Joint encoder
Absolute dual encoder
Joint type
Planetary
Maximum torque (N·m)
450 N·m
Battery performance
Ternary lithium battery: full charge voltage 71.4V, capacity 20Ah Solid-state battery: full charge voltage 74.8V, capacity 40Ah
Charging duration
Ternary lithium batteries: 2.5 hours; solid-state batteries: 3 hours
Battery type
Standard configuration: ternary lithium battery (solid-state battery available as an option)
Battery life per charge
4~5h
-
Open Source Edition
Price(USD)
54,000
Appearance
Release Edition
Height
173cm
Weight
Depending on the edition, the weight may vary (75kg to 85kg).
Total Degrees of Freedom
25
Degrees of Freedom per hand
0
Lower leg + thigh length
91cm
Arm length
60cm
Degree of freedom of the neck
2
Degree of freedom of the waist
1
Degrees of Freedom per arm
5
Articular movement space
Waist: Y-251°~71°
Hip: R-118°~62°, P-190°~130°, Y-81°~206°
Knee: P-15°~135°
Foot: P-39°~39°, R-15°~15°
Head: P-30°~30°, Y-70°~70°
Shoulder: P-170°~160°, R-140°~22°, Y-150°~150°
Elbow: P-131°~15°, R-150°~150°
Wrist: P:-25°~25°, R-35°~65°
(May vary depending on edition)Fully articulated hollow internal wiring
√
Hardware-supported movement speed
≥3m/s
Perception sensor
A proprietary system (stereoscopic vision + LiDAR) (featuring an open visual hardware interface, compatible with Intel and others)
Basic Computing Power (Robot PC)
Intel Module (Optional RK3588)
High-performance computing module (AI PC)
AGX Orin 64G (computing power customisable upgrade)
Communication module
Wi-Fi + Bluetooth + USB + LAN
secondary development
Support
Smart Battery (Quick-Release)
√
Lighting configuration
2 headlamps + 2 chest lamps + knee lamps
Microphone
Equipped
loudspeaker
Equipped
Handheld remote control
Equipped
Joint encoder
Absolute dual encoder
Joint type
Planetary
Maximum torque (N·m)
450 N·m
Battery performance
Ternary lithium battery: full charge voltage 71.4V, capacity 20Ah Solid-state battery: full charge voltage 74.8V, capacity 40Ah
Charging duration
Ternary lithium batteries: 2.5 hours; solid-state batteries: 3 hours
Battery type
Standard configuration: ternary lithium battery (solid-state battery available as an option)
Battery life per charge
4~5h
Degrees of Freedom per leg
6
-
Pro Edition
Price(USD)
63,000
(Champagne Gold, limited to 50 units at ¥260,000)Appearance
Release Edition
Height
173cm
Weight
Depending on the edition, the weight may vary (75kg to 85kg).
Total Degrees of Freedom
29 + 14 (dexterous hands) = 43
Degrees of Freedom per hand
7
Lower leg + thigh length
91cm
Arm length
60cm
Degree of freedom of the neck
2
Degrees of Freedom per leg
6
Degree of freedom of the waist
1
Degrees of Freedom per arm
5
Articular movement space
Waist: Y-251°~71°
Hip: R-118°~62°, P-190°~130°, Y-81°~206°
Knee: P-15°~135°
Foot: P-39°~39°, R-15°~15°
Head: P-30°~30°, Y-70°~70°
Shoulder: P-170°~160°, R-140°~22°, Y-150°~150°
Elbow: P-131°~15°, R-150°~150°
Wrist: P:-25°~25°, R-35°~65°
(May vary depending on edition)Fully articulated hollow internal wiring
√
Hardware-supported movement speed
≥3m/s
Perception sensor
A proprietary system (stereoscopic vision + LiDAR) (featuring an open visual hardware interface, compatible with Intel and others)
Basic Computing Power (Robot PC)
Intel Module (Optional RK3588)
High-performance computing module (AI PC)
AGX Orin 64G (computing power customisable upgrade)
Communication module
Wi-Fi + Bluetooth + USB + LAN
secondary development
Support
Smart Battery (Quick-Release)
√
Lighting configuration
2 headlamps + 2 chest lamps + knee lamps
Microphone
Equipped
loudspeaker
Equipped
Handheld remote control
Equipped
Joint encoder
Absolute dual encoder
Joint type
Planetary + Linear Force Control
Maximum torque (N·m)
450 N·m
Battery performance
Ternary lithium battery: full charge voltage 71.4V, capacity 20Ah Solid-state battery: full charge voltage 74.8V, capacity 40Ah
Charging duration
Ternary lithium batteries: 2.5 hours; solid-state batteries: 3 hours
Battery type
Standard configuration: ternary lithium battery (solid-state battery available as an option)
Battery life per charge
4~5h
-
Max Edition
Price(USD)
80,800
Appearance
Minor adjustments to the release version + enhanced chest and back design
Height
173cm
Weight
Depending on the edition, the weight may vary (75kg to 85kg).
Total Degrees of Freedom
32 + 14 (dexterous hand) = 46
Degrees of Freedom per hand
7
Lower leg + thigh length
91cm
Arm length
60cm
Degree of freedom of the neck
3
Degrees of Freedom per leg
6
Degree of freedom of the waist
3
Degrees of Freedom per arm
7
Articular movement space
Waist: Y-251°~71°
Hip: R-118°~62°, P-190°~130°, Y-81°~206°
Knee: P-15°~135°
Foot: P-39°~39°, R-15°~15°
Head: P-30°~30°, Y-70°~70°
Shoulder: P-170°~160°, R-140°~22°, Y-150°~150°
Elbow: P-131°~15°, R-150°~150°
Wrist: P:-25°~25°, R-35°~65°
(May vary depending on edition)Fully articulated hollow internal wiring
√
Hardware-supported movement speed
≥3m/s
Perception sensor
A proprietary system (stereoscopic vision + LiDAR) (featuring an open visual hardware interface, compatible with Intel and others)
Basic Computing Power (Robot PC)
Intel Module (Optional RK3588)
High-performance computing module (AI PC)
AGX Orin 64G (computing power customisable upgrade)
Communication module
Wi-Fi + Bluetooth + USB + LAN
secondary development
Support
Smart Battery (Quick-Release)
√
Lighting configuration
2 headlamps + 2 chest lamps + knee lamps
Microphone
Equipped
loudspeaker
Equipped
Handheld remote control
Equipped
Joint encoder
Absolute dual encoder
Joint type
Planetary + Linear Force Control
Maximum torque (N·m)
450 N·m
Battery performance
Ternary lithium battery: full charge voltage 71.4V, capacity 20Ah Solid-state battery: full charge voltage 74.8V, capacity 40Ah
Charging duration
Ternary lithium batteries: 2.5 hours; solid-state batteries: 3 hours
Battery type
Standard configuration: ternary lithium battery (solid-state battery available as an option)
Battery life per charge
4~5h
[1]The above parameters may vary depending on specific business scenarios, device postures, and other conditions. Please refer to the actual performance.
[2] For detailed functionalities, please refer to the SDK/API documentation.
[3] For more detailed warranty terms and conditions, please see the Product Warranty Manual.
[4] Due to the complex structure and extremely powerful actuators of the humanoid robot, users must maintain a safe distance and exercise extreme caution during operation.
[5]The product's exterior design may be subject to upgrades and adjustments. The final product shall prevail.
[6] Some of the example features on this page are still under development, testing, and refinement, and will be gradually released to users in the future.
[7] The humanoid robotics field is currently in a global early-stage exploration phase. Individual users are strongly advised to fully understand the current limitations of this technology before purchasing.
[8]This product is designated for civilian use. Any hazardous modifications or misuse of the robot is strictly prohibited.
[9] For more information regarding our product terms and policies, please visit the official ENGINEAI website and comply with all applicable local laws and regulations.

![[x]](/static/home/images/closeicon1.svg)