













ENGINEAI PM01
Technical Highlights
-

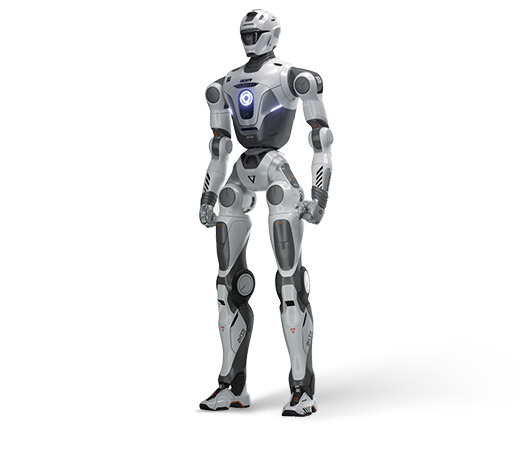
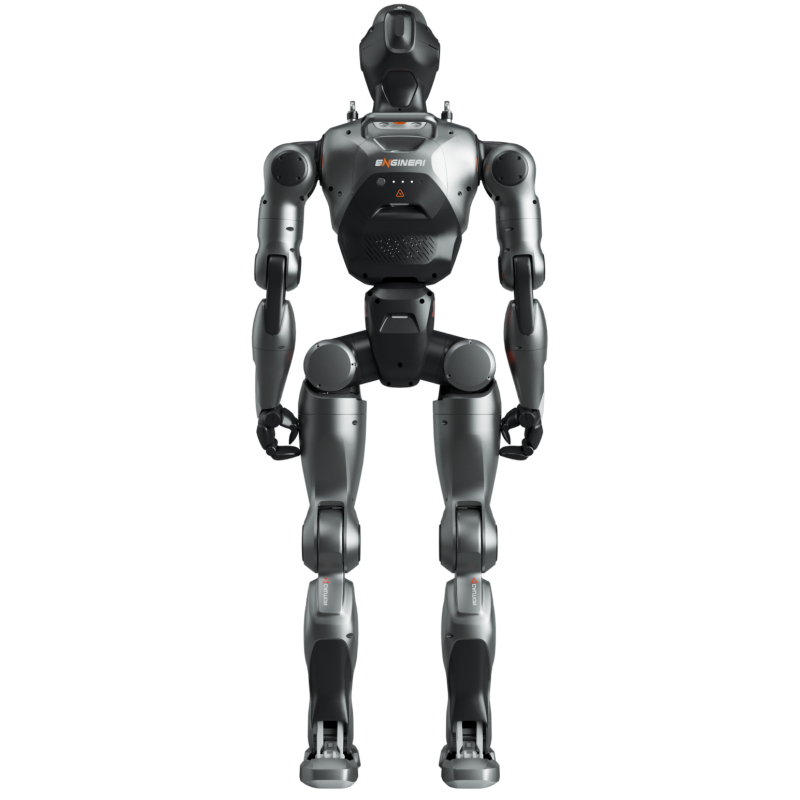
Elegant Aesthetic, Evolving a Classic
Balancing design beauty with mechanical dynamic performance.
-
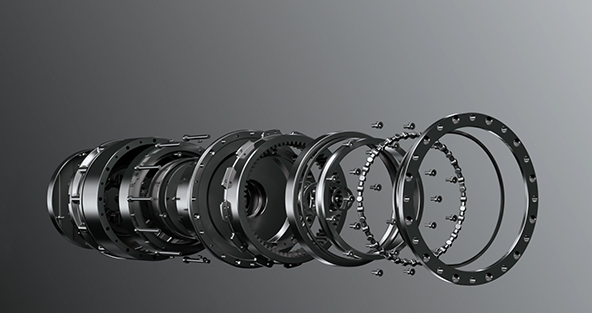
Full-Stack Proprietary Actuator Design
Integrated joint module delivering a peak torque of 130 N·m.
-

Exceptional Mobility
≥23 total degrees of freedom (DoF), 320° waist rotation, enabling complex movements like the "Axe Dance."
-

Interactive Core Display
Creating a new multi-dimensional intelligent interaction experience.
-
Ultimate Openness, Co-creating the Ecosystem
Providing low-level hardware interfaces and code support for training and deployment.

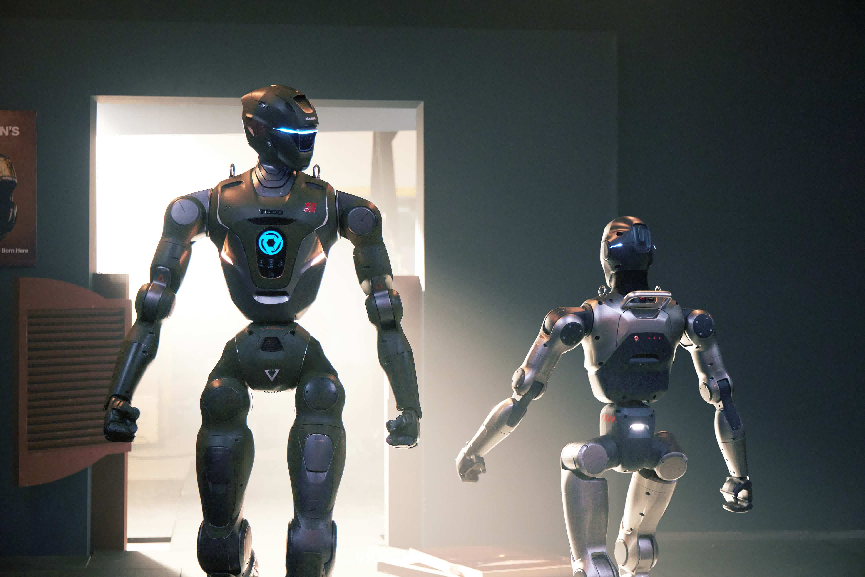
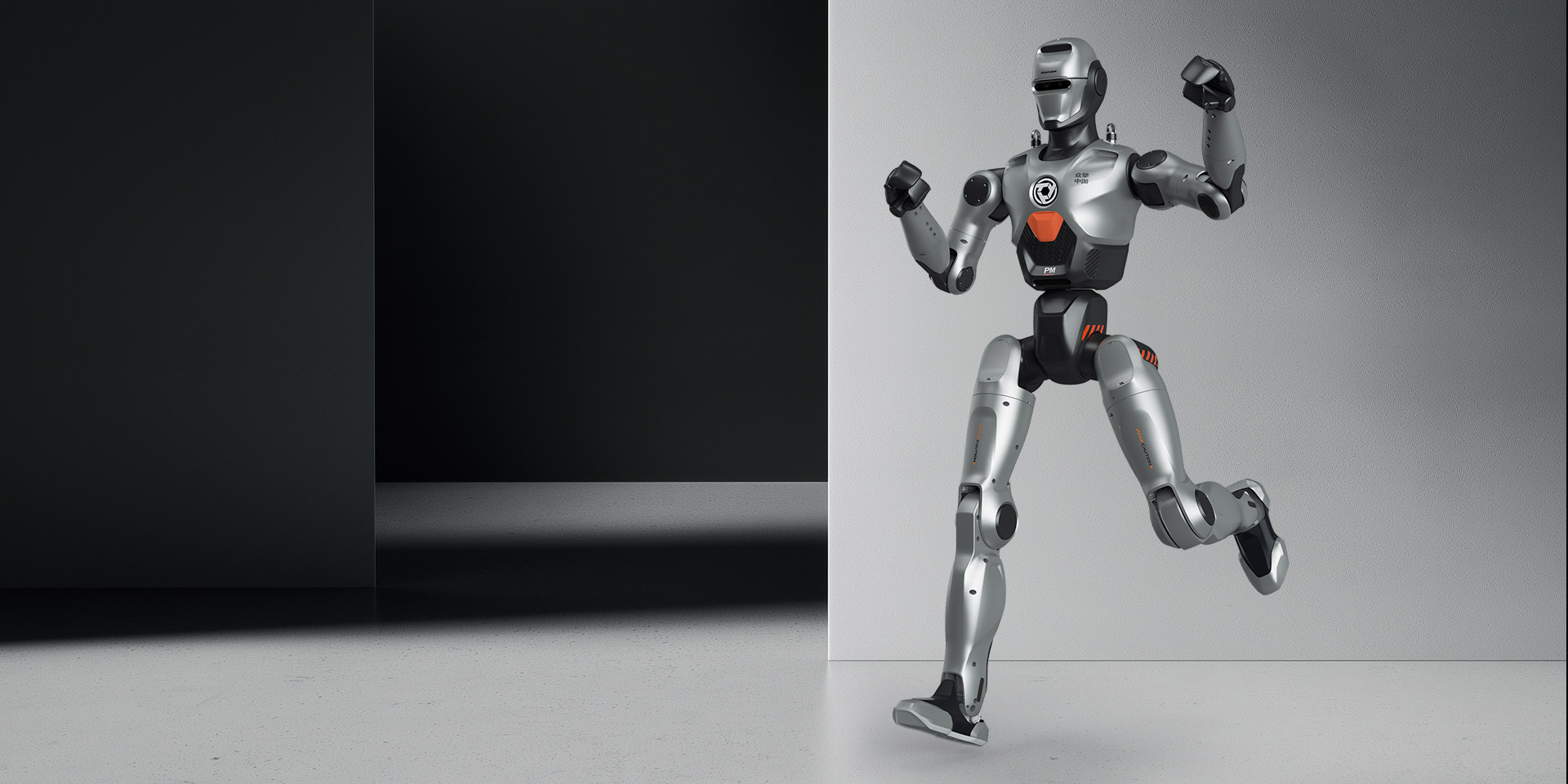
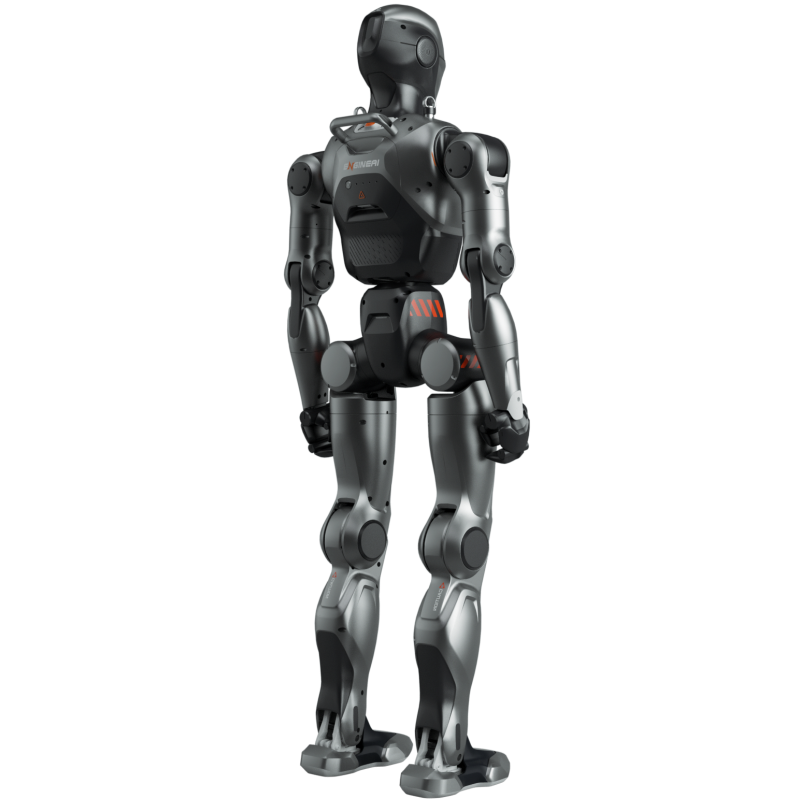
ENGINEAI's Most Agile Embodied Agent to Date
Thanks to exceptional body movement control algorithms and fully self-developed joint actuators, every motion can be executed with precision and stability.
 Play video
Play video
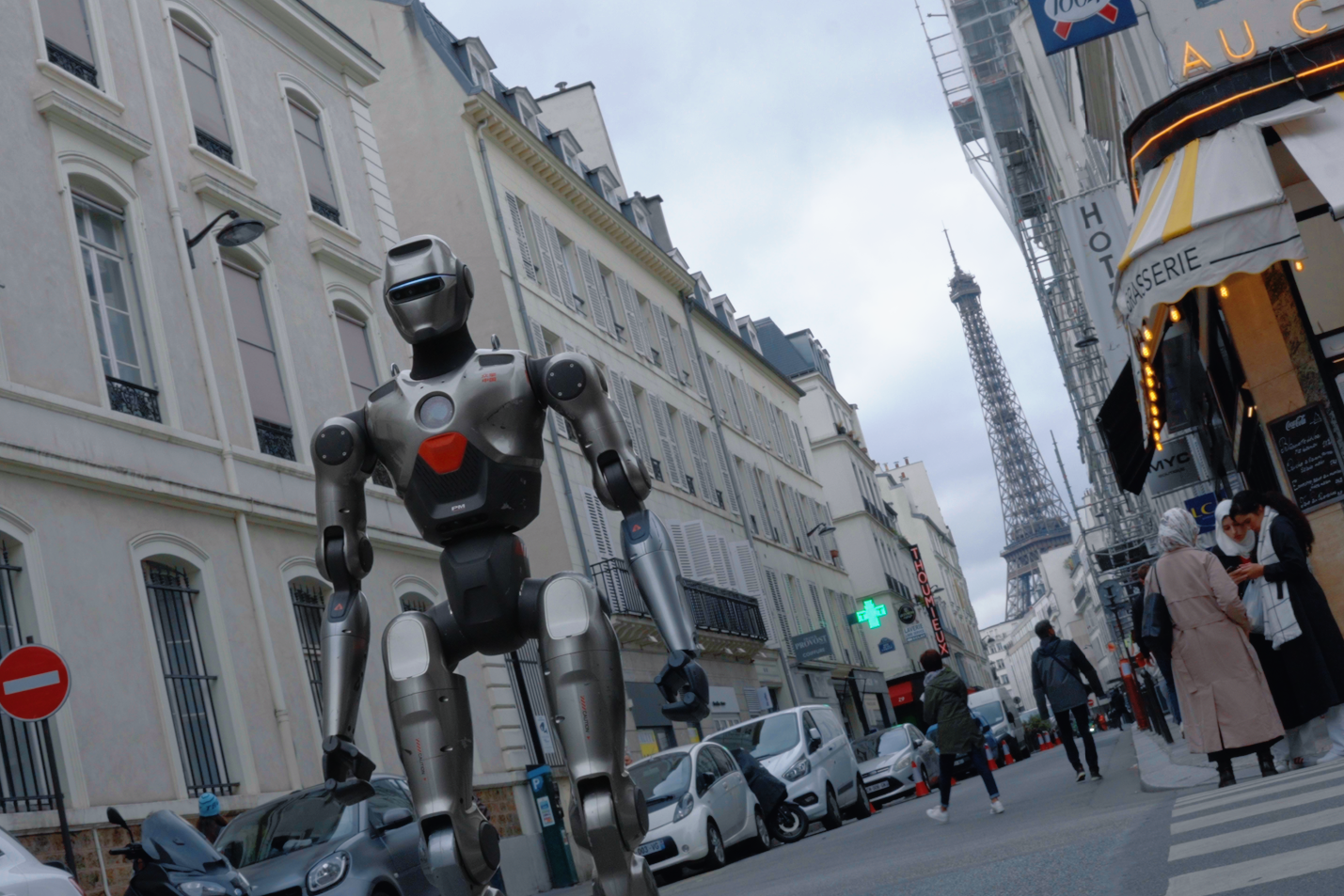
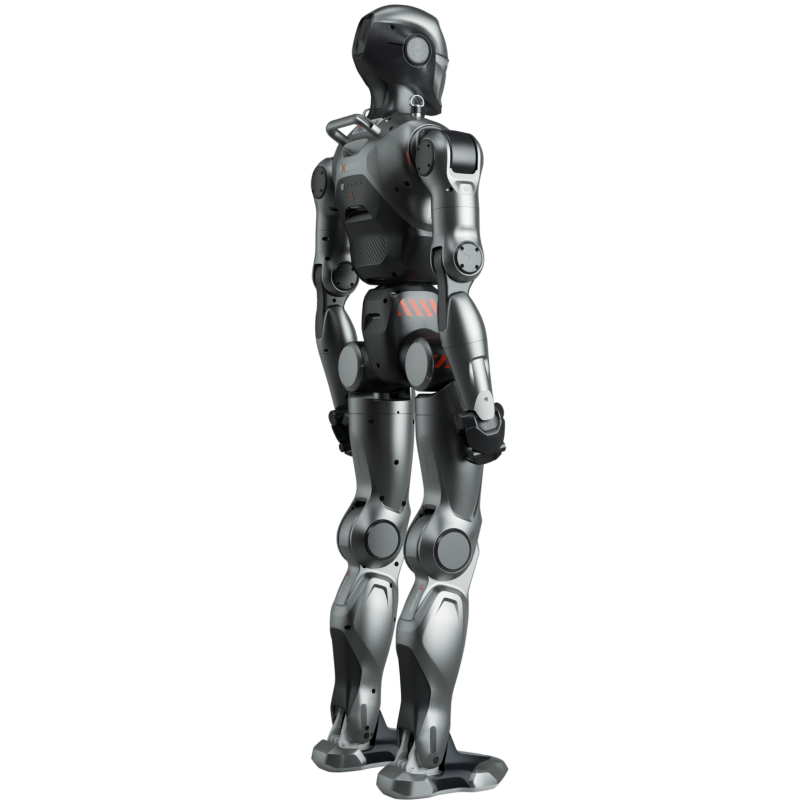
Greater Flexibility, Greater Freedom
Superlative agility, enabled by an ultra-wide range of motion and a total body freedom of ≥23 DOF






DOF of a Single Arm
5

Leg DOF
6

Waist Rotation Angle
>300 °
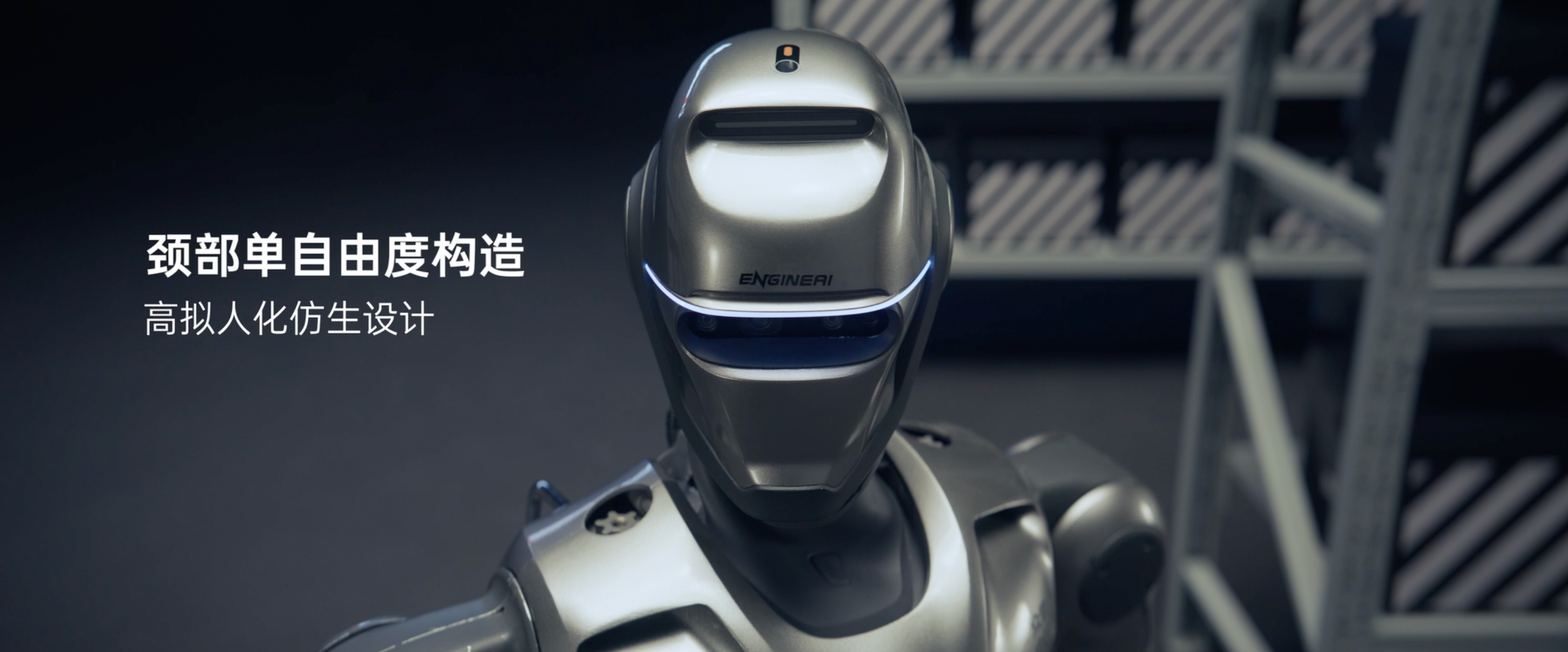
Head DOF
Personified Interactive Experience
5
6
>300 °
Personified Interactive Experience
PM01 High-Mobility Performance





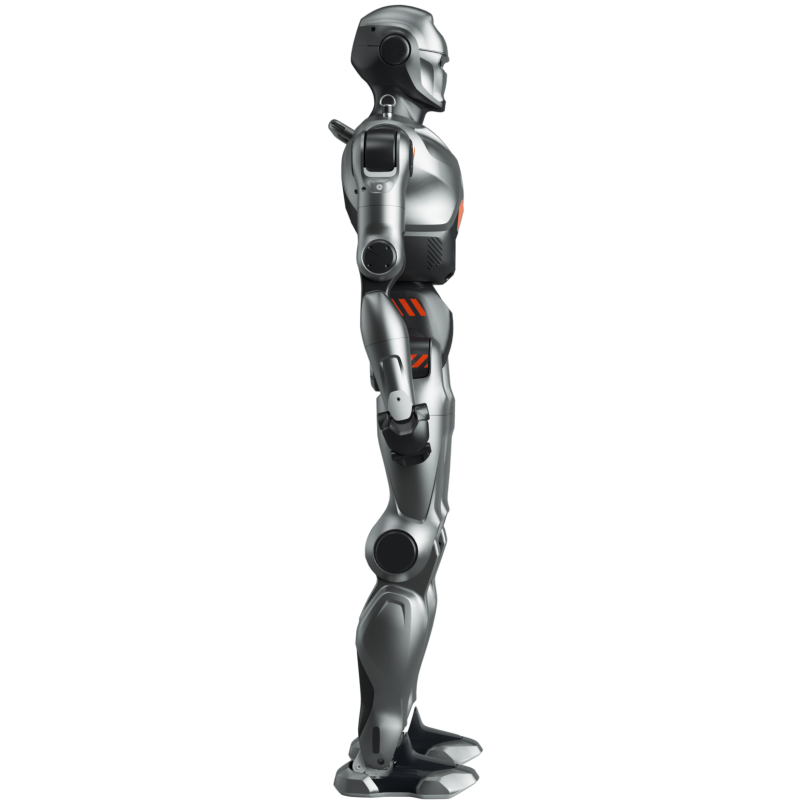
Excellence, in Every Move

The Ultimate Mechanical Aesthetics01

Smart Interactive Core Hub02

Family-Design Star Ring Light03

Learning in Simulation, Evolving Continuously
This end-to-end neural network, trained on optical motion capture data and adversarial learning, rapidly evolves in simulation. It adapts to complex terrains and scenarios, quickly mastering optimal strategies.
Join the Ecosystem, Co-create the Future of Robotics
-

Training Code Repository: Integrate cutting-edge algorithms such as reinforcement learning and deep learning to provide optimized, reusable frameworks, eliminating the need for repetitive ground-up development.
Open-Source Training Code

-
Deploy code repository: Achieve seamless transition from model to application, supporting efficient operation across diverse scenarios.
Open-Source Deployment Code
















































































Core Parameters

Lighting setup
Highly Recognizable Signature Star Halo Light
Touchscreen
Waist Joint Movement
>300°
Hip joint movement
R-29°~+134°、P-180°~+140°、Y-90°~+230°
Robot foot movement
All-Terrain Adaptation
Knee joint movement
-30°~+137°
Lighting setup
Highly Recognizable Signature Star Halo Light
Touchscreen
Waist Joint Movement
>300°
Hip joint movement
R-29°~+134°、P-180°~+140°、Y-90°~+230°

Robot foot movement
All-Terrain Adaptation
Knee joint movement
-30°~+137°
Detailed specifications
-
Size (Business Edition)
Dimensions (L × W × H, standing)
1400(H) x 535.55(W) x 252.66(D)
Weight (including battery)
About 42 kg
Calf and thigh length
686.5mm
Arm span
1.44m
Total DOF
23
-
Exercise parameters
Hollow-Shaft Joints with Internal Cable Routing
√
Joint Motion Space
lumbar joint:-230°~90°
hip joint:R-29°~+134°、P-180°~+140°、Y-90°~+230°
knee joint:-30°~+137°Movement speed
>2m/s(Hardware Support)
Basic computing power
4-core high-performance CPU
Smart Battery (Quick-Release)
10000mAh
Battery life
nearly 2 hours
Charging Power
54.6V 4.5A
Charging speed
nearly 2 hours
Lighting Configuration
Eye lamp, Buttock lamp
Handheld Remote Control
√
-
Motor Model (Q90H)
Joint encoder
Dual Encoding
Joint Type
Planetary
Maximum Torque (Nm)
145
Peak torque density
130Nm/kg
Maximum speed (rpm)
6400
Reduction ratio
25
Weight (kg)
1.1
-
Dimensions (Education Edition)
Dimensions (L × W × H, standing)
1400(H) x 535.55(W) x 252.66(D)
Weight (including battery)
nearly 43kg
Calf and thigh length
686.5mm
Arm span
1.44m
Total DOF
24
-
Motion Parameters
Fully Hollow-Joint Internal Routing
√
Joint Motion Space
lumbar joint:-230°~90°
Hip joint:R-29°~+134°、P-180°~+140°、Y-90°~+230°
knee joint:-30°~+137Movement Speed
>2m/s(Hardware Support)
Perception Sensor
Two depth cameras (head and waist)
Basic computing power
4-core high-performance CPU
High-Performance Computing Module
NVIDIA Jetson Orin NX (16G)
Secondary development
support
Smart Battery (Quick-Release)
10000mAh
Battery life
nearly 2 hour
Charging Power
54.6V 4.5A
Charging speed
nearly 2 hour
Lighting Configuration
Eye lamp, Buttock lamp
Handheld Remote Control
√
Touch screen
√
-
Motor Model (Q25H)
Joint encoder
Dual Encoding
Joint Type
Planetary
Maximum Torque (Nm)
50
Peak torque density
100 Nm/kg
Maximum speed (rpm)
8400
Reduction ratio
25
quanlity(kg)
0.5

![[x]](/static/home/images/closeicon1.svg)